![[靈蜂智能官網]-專業紅外熱像儀廠家](http://linfun.com.cn/wp-content/uploads/2022/06/2022060807191642.png)
![[靈蜂智能官網]-專業紅外熱像儀廠家](http://linfun.com.cn/wp-content/uploads/2021/10/202110130602107.png)
電力系統是一個集多學科技術應用的綜合性系統,在當前電網規模不斷擴大的背景下,電網的運營和維護成為了電網管理中必須重點考慮的問題。巡檢是電網運維工作中十分重要的一環,而傳統的以人工為主的變電站巡檢模式不僅耗費人力物力,而且安全性也難以得到保證,顯然已經不能再適應當前的電網發展需求。為此,各種高新技術紛紛被引進到電網的管理中,其中紅外熱成像巡檢機器人就是最具代表性的應用案例之一。

圖為變電站紅外熱成像巡檢機器人
紅外熱成像巡檢機器人技術是通過智能化設備代替人進行變電站巡檢的一種新興技術,是變電站管理智能化和信息化的重要標志。在當前的實踐中,所謂的智能巡檢技術實際上是以紅外熱像儀的應用為代表的。紅外熱成像巡檢機器人的應用較好地解決了人工巡檢中安全問題和效率問題,同時在各種參數的檢測中比人工巡檢具有無可比擬的優勢,機器人可以在短時間內完成大范圍、多參數、高可靠的巡檢任務,大大變電站智能化運營水平。
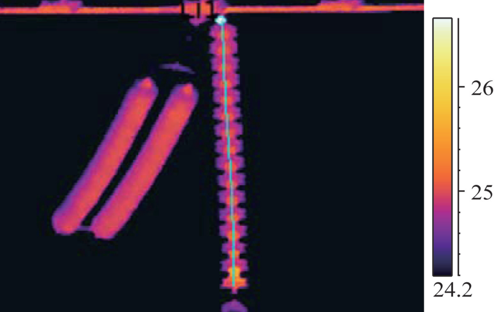
紅外熱成像巡檢機器人作為一個智能化電子系統,可以根據設計者的意愿和實際需求進行功能模塊的集成,具有很大的靈活性。但從當前的應用來年看,巡檢機器人在變電站中應用最多的功能主要包括紅外熱成像、路徑規劃、故障檢測、定位導航、遠程控制等等。當系統向現場巡檢機器人下發任務指令后,機器人需要通過內部算法模塊自動進行最優路徑的規劃,一般需要經過路徑搜索、路徑篩選和路徑模擬實驗等步驟,并經過人為的修正后,方可確定實際的巡檢路徑。故障檢測則主要依賴于紅外熱成像系統的溫度檢測功能,機器人通過紅外測溫實時分析各設備的溫度分布情況,并對過熱的地方進行拍照,同時采集設備發出的故障聲音,然后根據預設的條件進行故障分析和定位。定位導航是機器人按照規劃路徑行進的必要前提,變電站一般采用無軌導航,因此機器人內部實際上是導入了一個GIS地圖,也可以自帶GPS定位終端,使其可以自主完成定位、前進、拐彎、避障等功能。遠程控制是當前變電站巡檢機器人必不可少的功能,一方面,當機器人本身出現故障或出現突發情況時,需要由人對其進行遠程操控,防止事故發生。另一方面,對于一些較復雜的巡檢或維修工作,單靠算法是不現實的,可由技術人員遠程協助完成。